DOA使用说明¶
波达方向(Direct of Arrival,DOA)估计算法一般用于声源方位角度估计,以获取目标声源位置或者为语音增强算法提供先验信息。本文档主要介绍其适用场景及如何开启该功能。
1. SDK中DOA算法的默认配置和对应硬件板¶
CI110X系列芯片纯离线SDK不支持DOA算法,算法SDK和离在线SDK中DOA估计算法默认为关闭状态。使用DOA算法必须采用双麦克风硬件方案,可用启英泰伦提供的CIB03ST01J-WL21等离在线模块板或用户自行开发的双麦克风模块板,具体硬件选型可咨询启英泰伦技术支持人员。
2. 应用场景¶
DOA角度设置与麦克风阵列摆放位置示意图如下图所示。图a,b中麦克风阵列为线性双麦阵列,推荐麦间距为4cm。设置角度从左麦克到右麦克为0度到180度变化,利用DOA算法可以获取目标人声的方位角度。
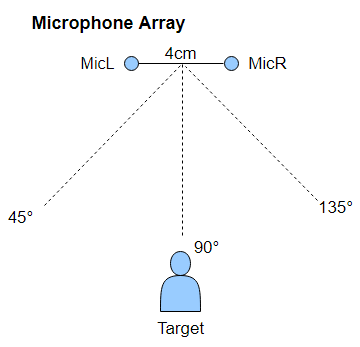
图 (a) 麦克风阵列横向结构与角度设置示意图
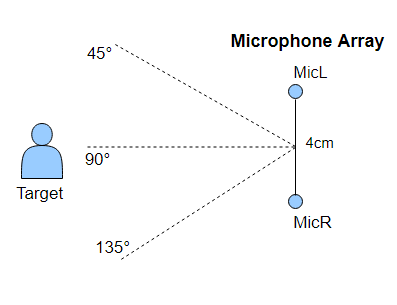
图(b) 麦克风阵列竖向结构与角度设置示意图
3. SDK开发示例的选择¶
离在线SDK:
- CI110X_SDK_Combine_Cloud/sample/internal/sample_media
sample_media是针对离在线方案场景的应用。该示例中算法功能配置方法与下文中算法SDK的sample中所提到的配置方法一致,因此不单独为其进行介绍。 在算法SDK中,DOA的使用一般用于sample_common工程,默认为关闭状态。当需要获取目标人声方位角度时,可选择打开DOA算法功能,具体实现见下文第4.1节。
4. sample_common工程使用说明¶
4.1. DOA估计算法的使用¶
步骤一:开启DOA估计算法
在文件sample\internal\sample_common\src\user_config.h中开启相关的宏
应用一:开启AEC功能的应用,需要使用外部codec
#define AUDIO_CAPTURE_USE_MULTI_CODEC 1
#define USE_TWO_MIC_DOA 0 // 1为开启,0为关闭,默认配置为关闭
应用二:关闭AEC功能的应用,无需外部codec
#define AUDIO_CAPTURE_USE_MULTI_CODEC 0
#define USE_TWO_MIC_DOA 0 // 1为开启,0为关闭,默认配置为关闭
步骤二:开启DOA的功能模式
在SDK\components\audio_in_manage\alg_doa_apply.h中设置DOA的功能模式
DOA存在3种工作模式:
模式(1)DOA_MODEL_VAD_ALWAYS :根据vad开始状态获取doa角度信息
模式(2)DOA_MODEL_WAKE_UP :根据唤醒词结束状态获取doa角度信息
模式(3)DOA_MODEL_CMD :根据命令词结束状态获取doa角度信息
#define DOA_MODEL DOA_MODEL_WAKE_UP //默认唤醒词模式
步骤三:角度获取、清除
/**
* @brief 获取当前角度信息(只有开启了DOA算法模块才有意义),
* 在被clear_current_doa_angle()清除角度之前,一直保持角度信息;
* 默认情况下,开启DOA算法模块时,当说唤醒词后更新角度信息,
* 开启DOA_MODEL_CMD模式,当说本地命令词后也会更新角度信息,
* 开启DOA_MODEL_VAD_ALWAYS模式,根据唤醒词更新角度信息;
* @return int, 角度信息,正常的数值范围为 0~180, 若返回其它值则表示错误;
*/
int get_current_doa_angle( void );
该角度信息显示为说话者的角度信息,在产品调试阶段,用户需要实际测试该API反馈的角度信息与实际产品中使用空间方位是否一致。
默认角度方位从左mic到右mic方向,doa的角度由0°到180°方向转变。
Mic方向确认测试方法:使用DOA估计算法功能,根据实际获取的角度信息对mic左右方向进行确定或调整。如用户站在产品左侧说唤醒词,得到的结果为45度,该方位信息实际表示方位为产品左侧, 那么135度就表示是产品的右侧。
/**
* @brief 清除当前角度信息(只有开启了DOA算法模块才有意义)
*
* @return int, 若返回0,表示成功; 若返回其它值则表示错误;
*/
int clear_current_doa_angle( void );
步骤四:调整mic间距
在sdk\compoents\audio_in_manage\alg_preprocess.c文件中算法初始化过程中设置mic间距:
#define MIC_DISTANCE MIC_DISTANCE_40MM //系统默认间距40mm
doa = ci_doa_create(MIC_DISTANCE)
注意
可选间距
30mm: MIC_DISTANCE_30MM
40mm: MIC _DISTANCE_40MM
50mm: MIC_DISTANCE_50MM
80mm: MIC _DISTANCE_80MM
120mm: MIC _DISTANCE_120MM
5.效果确认¶
5.1 角度输出分辨率选择¶
在sdk\compoents\audio_in_manage\alg_doa_apply.c文件中设置输出角度的分辨率
#define DOA_RESOLUTION (3) // DOA_RESOLUTION = 3、5、10
5.2 查看log¶
通过串口打印,当识别到唤醒词后,可以看到打印的角度信息,例如打印显示 angle = 90,表示声源在90°方向左右。
不同方位说唤醒词时,打印不同的角度信息,角度信息与实际目标语音所在方向吻合(如站在距离阵列1米位置,分别在mic两侧说唤醒词,一侧显示的角度是45度左右,另一侧显示的是135度左右,阵列正前方说唤醒词为90度左右),说明DOA估计算法模块工作正常。