脉冲宽度调制输出(PWM)¶
简介¶
PWM(Pulse Width Modulation,脉冲宽度调制)是一种对模拟信号电平进行数字编码的方式,通过不同频率的脉冲,以及使用不同占空比的方波来对一个具体的模拟信号进行电平编码,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替所需要波形的设备。
API¶
| 函数名 | 描述 |
|---|---|
| pwm_init | 初始化PWM设备 |
| pwm_start | 启动PWM设备 |
| pwm_stop | 停止PWM设备 |
| pwm_set_duty | 设置PWM占空比 |
| pwm_set_restart_md | 重新计数生效模式的选择 |
示例¶
(1) 以下代码配置并启动PWM0,%50占空比,1000频率
scu_set_device_gate(HAL_PWM5_BASE,ENABLE);
dpmu_set_io_reuse(PB4,SECOND_FUNCTION); //设置引脚功能复用
dpmu_set_io_direction(PB4,DPMU_IO_DIRECTION_OUTPUT); //设置引脚功能为输出模式
dpmu_set_io_pull(PB4,DPMU_IO_PULL_DISABLE); //设置关闭上下拉
pwm_init_t init;
init.clk_sel = 0;
init.freq = 1000;
init.duty = 50;
init.duty_max = 100;
pwm_init(PWM5,init);
pwm_stop(PWM5);
pwm_start(PWM5);
(2) 该芯片IP增加了重新计数生效模式的选择,例如初始化后,需要在不同占空比之间切换,希望前一个占空比的PWN波完整输出后,后一个占空比重新计数才生效,可以参考下列示例代码。
scu_set_device_gate(HAL_PWM5_BASE,ENABLE);
dpmu_set_io_reuse(PB4,SECOND_FUNCTION); //设置引脚功能复用
dpmu_set_io_direction(PB4,DPMU_IO_DIRECTION_OUTPUT); //设置引脚功能为输出模式
dpmu_set_io_pull(PB4,DPMU_IO_PULL_DISABLE); //设置关闭上下拉
pwm_init_t init;
init.clk_sel = 0;
init.freq = 1000;
init.duty = 50;
init.duty_max = 100;
pwm_init(PWM5,init);
pwm_set_restart_md(PWM5,1); //配置等待正在进行的PWM波完整输出后重新计数才生效
pwm_stop(PWM5);
pwm_start(PWM5);
//延时1s后
pwm_set_duty(PWM5,30,100) //切换到占空比30%
配置等待正在进行的PWM波完整输出后重新计数才生效,波形结果如下:
 {:.center }
{:.center }
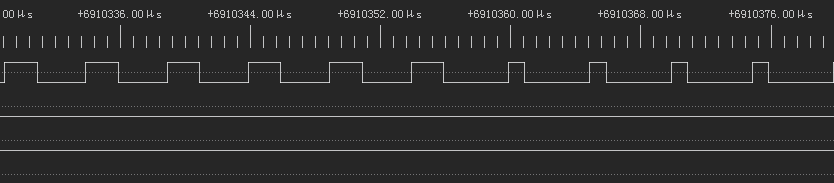
配置重新计数立即生效,pwm_set_restart_md(PWM0,0),波形结果如下:
 {:.center }
{:.center }
(3) 2组PWM实现互补输出功能
scu_set_device_gate(HAL_PWM5_BASE,ENABLE);
dpmu_set_io_reuse(PB4,SECOND_FUNCTION); //设置引脚功能复用
dpmu_set_io_direction(PB4,DPMU_IO_DIRECTION_OUTPUT); //设置引脚功能为输出模式
dpmu_set_io_pull(PB4,DPMU_IO_PULL_DISABLE); //设置关闭上下拉
pwm_init_t init;
init.clk_sel = 0;
init.freq = 16000;
init.duty = 50;
init.duty_max = 100;
pwm_init(PWM5,init);
pwm_stop(PWM5);
scu_set_device_gate(HAL_PC_BASE,ENABLE);
scu_set_device_gate(HAL_PWM0_BASE,ENABLE);
dpmu_set_io_reuse(PC4,FORTH_FUNCTION); //设置引脚功能复用
dpmu_set_io_direction(PC4,DPMU_IO_DIRECTION_OUTPUT); //设置引脚功能为输出模式
dpmu_set_io_pull(PC4,DPMU_IO_PULL_DISABLE); //设置关闭上下拉
init.clk_sel = 0;
init.freq = 16000;
init.duty = 50;
init.duty_max = 100;
pwm_init(PWM0,init);
pwm_stop(PWM0);
{
volatile uint32_t i = 0;
taskENTER_CRITICAL();
pwm_start(PWM5);
for (i = 0;i < 0x210;i++);
pwm_start(PWM0);
taskEXIT_CRITICAL();
}
常见问题¶
PWM模块基础时钟为主频的一半,例如CLK_S = 100000000Hz(100M)。
PWM频率与PWM最大占空比的关系:
- CLK_S 大于等于(freq * duty_max)
- 当freq为10000000Hz(10M)时,此时duty_max最大可配置为10
- 当freq为1000000Hz(1M)时,此时duty_max最大可配置为100
- 当freq为100000Hz(100K)时,此时duty_max最大可配置为1000
最大频率支持:
- freq = 50000000Hz(50M)
- duty_max = 2;