通用异步收发传输器(UART)¶
1、简介¶
UART(通用异步收发传输器)是一种通用串行数据总线,用于异步通信;可以实现全双工传输和接收。
2、时序¶
2.1、 基础简介¶
- UART工作原理是将数据的二进制位一位一位的进行传输。在UART通讯协议中信号线上的状态位高电平代表’1’低电平代表’0’
- 硬件连接比较简单,仅需要3条线,TX、RX、GND
- TX(发送数据端,要接对面设备的RX)
- RX(接收数据端,要接对面设备的TX)
- 空闲位(当总线处于空闲状态时信号线的状态为‘1’即高电平)
- 起始位(开始传输时要先发出一个低电平’0’来表示传输字符的开始)
- 数据位(起始位之后就是要传输的数据,数据一般都是8位。先发送最低位最后发送最高位)
- 奇偶校验位(数据位传送完成后,要进行奇偶校验)
- 停止位(数据结束标志,可以是1位,1.5位,2位的高电平)
- 波特率(传输一个比特需要的时间是(1/波特率)秒)
2.2、时序图分析¶
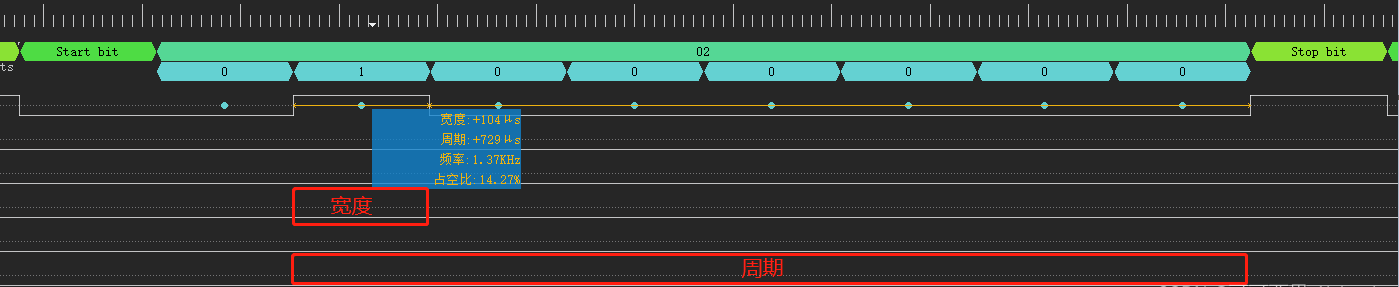
- (1)、传输1个字节的时序图,起始位、8位数据、停止位。
 {:.center }
{:.center }
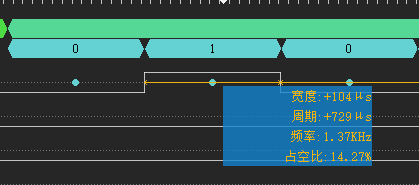
- (2)、波特率计算,找到发送1位数据的宽度,例如下图,时间是104 us
 {:.center }
{:.center }
- 根据计算,1/波特率 = 104 us = 1.04e-4 s(1.04的负4次方秒) ,得出波特率约为9600
3、API¶
| 函数名 | 描述 |
|---|---|
| UARTPollingConfig | UART 轮询模式初始化配置 |
| UARTInterruptConfig | UART 中断模式初始化配置 |
| UARTDMAConfig | UART DMA模式初始化配置 |
| UART_IntMaskConfig | UART 中断屏蔽设置 |
| UART_IntClear | UART 中断标志清除 |
| UartPollingReceiveData | 轮询方式接收一个Byte数据 |
| UartPollingSenddata | 轮询方式发送一个Byte数据 |
4、示例¶
1) 以下代码配置UART0轮询模式,发送和接收数据,收发完毕后进行数据对比验证;
#include "ci130x_uart.h"
void main(void)
{
//初始化发送接收数据数组
int i;
unsigned char buf_send[32] = {0x0};
unsigned char buf_recv[32] = {0x0};
for(i = 0;i < 32;i++)
{
buf_send[i] = i;
}
//初始化UART0(轮询模式),波特率115200
UARTPollingConfig(UART0, UART_BaudRate115200);
//发送数据:每次发送一个byte
for(i=0;i<32;i++)
{
UartPollingSenddata(UART0,buf_send[i]);
}
//接收数据:每次接收一个byte
for(i=0;i<32;i++)
{
buf_recv[i] = UartPollingReceiveData(UART0);
}
//比较接收发送数据是否相等
for(i = 0;i < 32;i++)
{
if(buf_send[i] != buf_recv[i])
{
mprintf("Comparison of the Data Fail\n");
while(1);
}
}
mprintf("Comparison of the Data Successful\n");
while(1);
}
2) 以下代码配置UART0中断模式并使用轮询发送数据,中断接收数据,收发完毕后进行数据对比验证;
#include "ci130x_uart.h"
unsigned char buf_send[32] = {0x0};
unsigned char buf_recv[32] = {0x0};
void pad_config_for_uart(UART_TypeDef *UARTx)
{
if (UARTx == UART0)
{
dpmu_set_io_reuse(PB5,SECOND_FUNCTION);
dpmu_set_io_reuse(PB6,SECOND_FUNCTION);
#if 1
//如果外部有上拉电阻到5V,这样配
dpmu_set_io_open_drain(PB5,ENABLE); //配置引脚开漏功能,支持外部上拉5V
dpmu_set_io_open_drain(PB6,ENABLE); //配置引脚开漏功能,支持外部上拉5V
dpmu_set_io_pull(PB5,DPMU_IO_PULL_DISABLE); //关闭上拉
dpmu_set_io_pull(PB6,DPMU_IO_PULL_DISABLE); //关闭上拉
#else
//如果外部没有上拉
dpmu_set_io_pull(PB5,DPMU_IO_PULL_UP); //开启上拉
dpmu_set_io_pull(PB6,DPMU_IO_PULL_UP); //开启上拉
#endif
}
else if (UARTx == UART1)
{
dpmu_set_io_reuse(PB7,SECOND_FUNCTION);
dpmu_set_io_reuse(PC0,SECOND_FUNCTION);
dpmu_set_io_pull(PC0,DPMU_IO_PULL_UP); //RX需开启上拉
}
else if (UARTx == UART2)
{
dpmu_set_io_reuse(PB1,THIRD_FUNCTION);
dpmu_set_io_reuse(PB2,THIRD_FUNCTION);
dpmu_set_io_pull(PB2,DPMU_IO_PULL_UP); //RX需开启上拉
}
}
void main(void)
{
int i = 0;
pad_config_for_uart(UART0);
//初始化UART0(中断模式)
UARTInterruptConfig(UART0,UART_BaudRate115200);
//初始化发送接收数据数组
for(i = 0;i < 32;i++)
{
buf_send[i] = i;
}
//发送数据:每次发送一个byte
for(i=0;i<32;i++)
{
UartPollingSenddata(UART0,buf_send[i]);
}
//比较接收发送数据是否相等
for(i = 0;i < 32;i++)
{
if(buf_send[i] != buf_recv[i])
{
mprintf("Comparison of the Data Fail\n");
while(1);
}
}
mprintf("Comparison of the Data Successful\n");
while(1);
}
#include "ci130x_uart.h"
extern unsigned char buf_recv[32];
int length = 0;
void UART0_IRQHandler(void)
{
/*发送数据*/
if (UART0->UARTMIS & (1UL << UART_TXInt))
{
;
}
/*接受数据*/
if (UART0->UARTMIS & (1UL << UART_RXInt))
{
//here FIFO DATA must be read out
buf_recv[length] = UartPollingReceiveData(UART0);
length ++;
}
UART_IntClear(UART0,UART_AllInt);
}
3) 以下代码配置UART0 DMA模式并使用DMA模式发送和接收数据,收发完毕后进行数据对比验证;
#include "ci130x_uart.h"
#include "ci130x_dma.h"
unsigned char buf_send[2048] = {0};
unsigned char buf_recv[2048] = {0};
void pad_config_for_uart(UART_TypeDef *UARTx)
{
if (UARTx == UART0)
{
dpmu_set_io_reuse(PB5,SECOND_FUNCTION);
dpmu_set_io_reuse(PB6,SECOND_FUNCTION);
#if UART_PAD_OPENDRAIN_MODE_EN
dpmu_set_io_pull(PB5,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_pull(PB6,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_open_drain(PB5);
#else
dpmu_set_io_pull(PB6,DPMU_IO_PULL_UP); //RX需开启上拉
#endif
}
else if (UARTx == UART1)
{
dpmu_set_io_reuse(PB7,SECOND_FUNCTION);
dpmu_set_io_reuse(PC0,SECOND_FUNCTION);
#if UART_PAD_OPENDRAIN_MODE_EN
dpmu_set_io_pull(PB7,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_pull(PC0,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_open_drain(PB7);
#else
dpmu_set_io_pull(PC0,DPMU_IO_PULL_UP); //RX需开启上拉
#endif
}
else if (UARTx == UART2)
{
dpmu_set_io_reuse(PB1,THIRD_FUNCTION);
dpmu_set_io_reuse(PB2,THIRD_FUNCTION);
#if UART_PAD_OPENDRAIN_MODE_EN
dpmu_set_io_pull(PB1,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_pull(PB2,DPMU_IO_PULL_DISABLE); //RX关闭上拉,使用外部上拉
dpmu_set_io_open_drain(PB1);
#else
dpmu_set_io_pull(PB2,DPMU_IO_PULL_UP); //RX需开启上拉
#endif
}
}
void main(void)
{
scu_set_dma_mode(DMAINT_SEL_CHANNELALL);
int i = 0;
pad_config_for_uart(UART0);
//初始化发送接收数据数组
for(i = 0;i < 2048;i++)
{
buf_send[i] = i;
}
//初始化UART0(DMA模式)
UARTDMAConfig(UART0, UART_BaudRate115200);
//配置DMA数据传输宽度
TRANSFERWIDTHx trans_width = TRANSFERWIDTH_8b;
//DMA传输数据长度(单位:Byte)
int bytesize = 2048;
//DMA接收数据
DMAC_M2P_P2M_advance_config(DMACChannel0,
DMAC_Peripherals_UART0_RX,
P2M_DMA,
UART0_DMA_ADDR,
(unsigned int)buf_recv,
bytesize,
trans_width,
BURSTSIZE1,
DMAC_AHBMaster1);
//DMA发送数据
DMAC_M2P_P2M_advance_config(DMACChannel1,
DMAC_Peripherals_UART0_TX,
M2P_DMA,
(unsigned int)buf_send,
UART0_DMA_ADDR,
bytesize,
trans_width,
BURSTSIZE1,
DMAC_AHBMaster1);
//等待DMA Channel1发送完成
if(RETURN_ERR == wait_dma_translate_flag(DMACChannel1,0xffffff))
{
mprintf("send dma irq err\n");
while(1);
}
//等待DMA Channel0接收完成
if(RETURN_ERR == wait_dma_translate_flag(DMACChannel0,0xffffff))
{
mprintf("recv dma irq err\n");
while(1);
}
//比较接收发送数据是否相等
for(i = 0;i < 2048;i++)
{
if(buf_send[i] != buf_recv[i])
{
mprintf("Comparison of the Data Fail\n");
while(1);
}
}
mprintf("Comparison of the Data Successful\n");
while(1);
}
#include "ci130x_uart.h"
#include "ci130x_dma.h"
void DMA_IRQHandler(void)
{
int reg = DMAC->DMACIntTCStatus;
if (reg & (1 << DMACChannel0))
{
CALL_CALLBACK(g_dma_channel0_callback);
}
if (reg & (1 << DMACChannel1))
{
CALL_CALLBACK(g_dma_channel1_callback);
}
DMAC->DMACIntTCClear = reg;
}
5、其它¶
- 常用的波特率范围如下所示
| UARTx | 波特率:Bps |
|---|---|
| UART0 | 2400,4800,9600,1920038400,57600,115200230400,380400,460800921600,1M,2M,3M |
| UART1 | 2400,4800,9600,1920038400,57600,115200230400,380400,460800921600,1M,2M,3M |
| UART2 | 2400,4800,9600,1920038400,57600,115200230400,380400,460800921600,1M,2M,3M |