DOA使用说明¶
波达方向(Direction of Arrival,DOA)估计算法一般用于声源方位角度估计,以获取目标声源位置。本文档主要介绍其适用场景及如何开启该功能。
1.SDK中DOA算法的默认配置和对应硬件板¶
使用DOA算法必须采用双麦克风硬件方案,默认芯片配置为CI1306。
2.应用场景¶
DOA角度设置与麦克风阵列摆放位置示意图如下图所示。图a,b中麦克风阵列为线性双麦阵列,推荐麦间距为4cm。设置角度从左麦克到右麦克为0度到180度变化,利用DOA算法可以获取目标人声的方位角度。
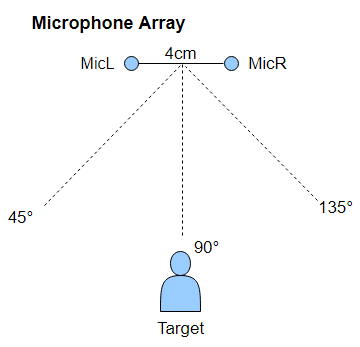
图 (a) 麦克风阵列横向结构与角度设置示意图

图(b) 麦克风阵列竖向结构与角度设置示意图
3. offline_asr_sample工程使用说明¶
3.1 DOA算法使用说明¶
步骤一:开启DOA算法
在文件projects\offline_asr_sample\src\user_config.h中开启相关的宏
//打开双麦DOA功能
#define USE_DOA_MODULE 1
//关闭双麦DOA功能
#define USE_DOA_MODULE 0
步骤二:参数配置
在projects\offline_asr_sample\src\ci_ssp_config.c文件中配置DOA算法参数:
//doa模块配置
const doa_config_t doa_config =
{
.distance = 40 ,
.min_frebin = 40,
.max_frebin = 130,
.samplerate = 16000,
.doa_resolut = 5 // doa_resolut = 3、5、10
};
参数说明:
distance:麦克风阵列麦间距,int类型,默认40mm
min_frebin:进行DOA计算的最低频点,范围为[0 255],默认40
max_frebin:进行DOA计算的最高频点,范围为[0 255],默认130
samplerate:输入音频采样率,默认16000
doa_resolut:DOA输出分辨率,只能选择3、5、10。分别表示输出为3个角度、5个角度和10个角度。
3个角度的输出为45°、90°和135°;
5个角度的输出为0°、45°、90°、135°和180°;
10个角度的输出为0到180°,每间隔20°输出一个角度。
备注:DOA默认使用唤醒词模式,即识别到唤醒词后会输出对应角度信息。
4.效果确认¶
4.1 查看log¶
通过串口打印,当识别到唤醒词后,可以看到打印的角度信息,例如打印显示 angle = 90,表示声源在90°方向左右。
不同方位说唤醒词时,打印不同的角度信息,角度信息与实际目标语音所在方向吻合(如站在距离阵列1米位置,分别在mic两侧说唤醒词,一侧显示的角度是45度左右,另一侧显示的是135度左右,阵列正前方说唤醒词为90度左右),说明DOA估计算法模块工作正常。